PROGRAM 2.2a Quick Return Mechanism
Input the lengths of the links
length of the fixed link
crank
link 4
link 5
link 7
height of the slider
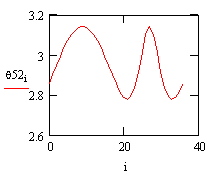
start calculating the mechanism displacement
input angle in rad. step each 10 degrees
1st closure
2nd closure
1st closure
2nd closure
Locations of the mechanism joints through the motion
Crank location
Tip of Link 4 location
position of C by 1st closure
position of C by 2nd closure
closure #1
closure #2
Motion over One Cycle
(1st closure)
Motion over One Cycle
(2nd closure)
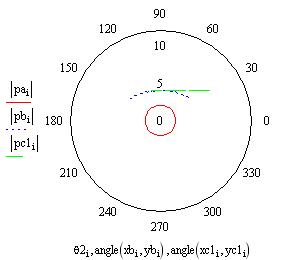
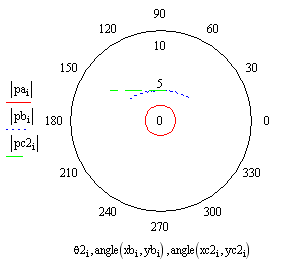
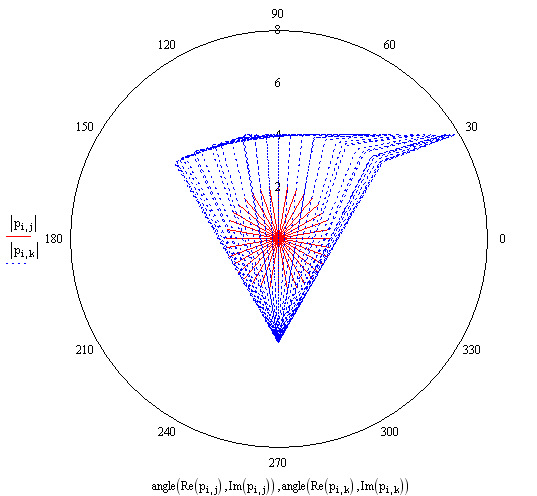
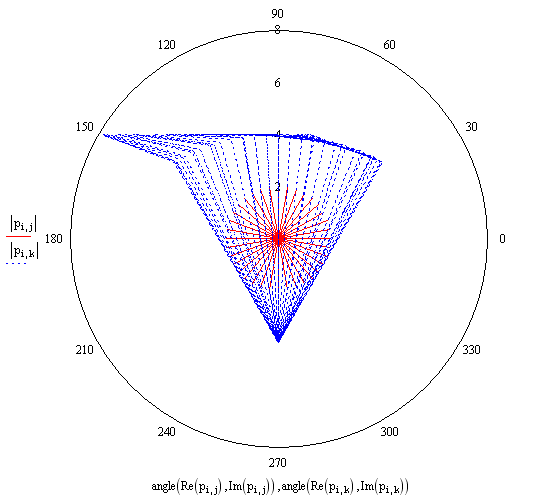
Plot the results (links). Use polar plots to avoid distortion of the aspect ratio.
change to avoid bug in mathcad
Motion over One Cycle
(1st closure)
change to avoid bug in mathcad
Motion over One Cycle
(2nd closure)