4-Bar Mechanism Acceleration Analysis
Input the lengths of the links
fixed link
crank
coupler
output
The mechanis is a crank-rocker since 140+40 < 120+80
angle of the fixed link
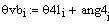
start calculating the mechanism displacement
input angle in rad. step each 10 degrees
closure #1
closure #2
closure #1
closure #2
calculate the coordinates of the end points of link #2
calculate the coordinates of the end points of link #2 (closure #1)
calculate the coordinates of the end points of link #2 (closure #2)
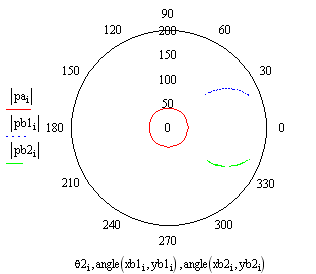
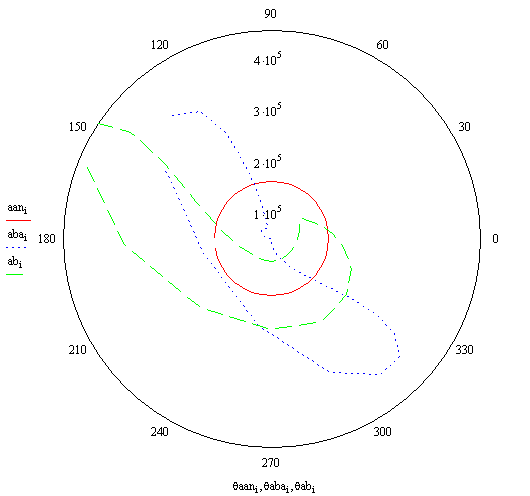
Plot the results (end points only). Use polar plots to avoid distortion of the aspect ratio. In polar plot a point is identified using angle and magnitude. Refer all vectors to the same point to get meaningful results.
closure #1
closure #2
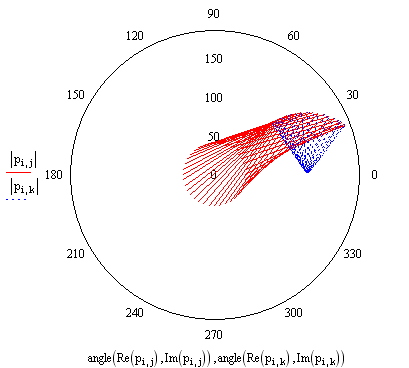
Motion over One Cycle
(Two closures)
Plot the results (links). Use polar plots to avoid distortion of the aspect ratio.
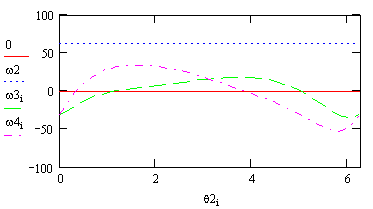
Velocity analysis
input link 2 rotational speed in rad/sec
angle of velocity vector of a
velocity of point a
Modify point B relative velocity vector according to w4 direction
Modify point B absolute velocity vector according to w4 direction
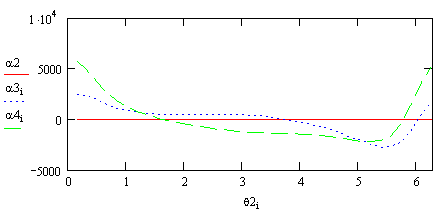
Acceleration Analysis
normal acceleration of a
normal acceleration of b with respect to a
tangential acceleration of b with respect to a
magnitude of acceleration of b with respect to a
direction of acceleration of b with respect to a
normal acceleration of b
tangential acceleration of b
direction of acceleration of b
magnitude of acceleration of b