
UNLV - DEPARTMENT OF MECHANICAL ENGINEERING
DESIGN PROJECT SCHEDULE - Spring 2012
ME 100L Introduction to Mechanical and Aerospace Engineering Lab
Your Assignment: Design and build a Sumo Robot that pushes the opposing robot from a circular platform. Students enrolled in the MEG 100 Lab will form design teams of approx. 3-4 students. Each team will design, build, and program a mobile robot that operate autonomously. Each team will be given a Lego robot building kit. You will be working in room CBC C234A. (Classroom Building next to the Library, C-Building, second floor), the Undergraduate Robotics Laboratory. Lab opening times are posted below. You will have access to computer room TBE-B 367 for Autocad or ProEngineer solid modeling.
![]()
Line Tracking Robot (designed during the UNLV summer robot lab class of 2007) and NXT Walking Robot
TEAMS
Each team meets weekly with the lab instructor to present work to date and discuss project direction.
Each team meets weekly to assign work among team members, and to discuss next week's assignments.
The team leader keeps a log of weekly activities, attendance, and of each team member's participation.
The log will be submitted to the Lab TA at the end of the semester and will be graded.
The grades for individual team members will be adjusted to reflect each team member's contribution
to the team effort. Extraordinary efforts will be rewarded by a higher grade.
Reduced or failing grades will be given to those performing a low levels.
Please submit all lab reports to the Lab TA (Teaching Assistant) on the due date, and before the lab starts.
A specific activity is assigned for each week in the schedule below. Progress reports are due before your lab session the week following the assignment.
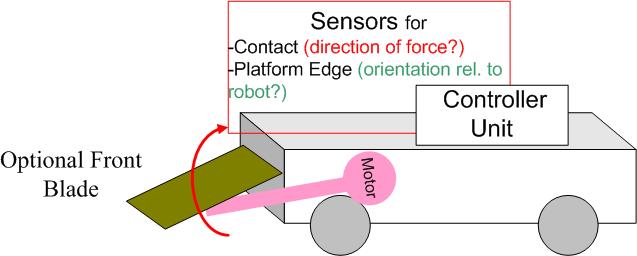
Figure: Sumo Robot Concept
Lab Schedule: The schedule below lists your weekly assignments and reporting requirements. Please submit BOTH the Lab Assignment/Reports AND the Project Assignment reports on the due dates listed.
|
Week |
Dates |
Lab Topics |
Lab Assignment/Reports 1 report each week starting in week 3. 10 points each report. |
Project Assignment (Scroll down for Details) |
Project Assignment Points (these are in addition to the weekly lab reports) |
|
1 |
1/18 |
NO LAB FIRST WEEK OF THE SEMESTER |
|
|
|
|
2 |
1/23 |
· Lab Introduction · Team Formation · Introduction to Lego Digital Designer |
Lego Digital Designer Exercise (See Handout) Due: Week 3
|
Problem Definition (Individual Student Assignment 1) Due: Week 3 |
10 |
|
3 |
1/30 |
· LEGO Mindstorms NXT Kit Check-Out · LEGO Mindstorms NXT Introduction |
TriBot Propulsion Exercise
Due: Week 4 |
Literature & Patent Search (Individual Student Assignment 2) Due: Week 5 |
10 |
|
4 |
2/06 |
· Understanding the Light Sensor · Using the Wait, Loop, and Switch Blocks · Performing Sensor Calibration |
Line Following Exercise
Due: Week 5 |
|
|
|
5 |
2/13 |
· Understanding the Ultra Sonic Sensor · Using the Sensor Blocks |
Obstacle Avoidance Exercise
Due: Week 6 |
Constraints & Design Criteria (Group/Team Assignment 3) Due: Week 6 |
10 |
|
6 |
2/22 |
· Introduction to MathCAD · Understanding the Touch Sensor |
Object Detection Exercise
Due: Week 7 |
Alternative Solutions (Group/Team Assignment 4) Due: Week 7 |
10 |
|
7 |
2/27 |
· Introduction to Boolean Logic and Comparison · Using Blocks from the Data Palette |
Comparison/Variable Exercise
Due: Week 8 |
Decision (Group/Team Assignment 5) Due: Week 8 |
10 |
|
8 |
3/05 |
· Understanding Gear Ratios · Creating My Blocks · Begin Sumo Robot Construction |
Status of robot build
Due: Week 10 |
|
|
|
9 |
3/12 |
· Continue Sumo Robot Construction |
|
|
|
|
10 |
3/19 |
· How to Create/Execute Parallel Lines of Code · Continue Sumo Robot Construction · Begin Sumo Robot Programming |
Status of robot build
Due: Week 12 |
Design Project Report (Group/Team Assignment 6) Due: Week 15 |
100 |
|
11 |
3/26 |
· Continue Sumo Robot Programming |
|
|
|
|
12 |
4/09 |
· Test/Debug Sumo Robot Hardware & Software · Work on Final Report · Work on Final Presentation |
Status of robot build
Due: Week 14 |
Design Project Presentation (Group/Team Assignment 7) Due: Week 15 |
100 |
|
13 |
4/16 |
· Continue Sumo Robot Programming · Test/Debug Sumo Robot Hardware & Software |
|
|
|
|
14 |
4/23 |
· Test/Debug Sumo Robot Hardware & Software · Work on Final Report · Work on Final Presentation |
|
|
|
|
15 |
4/30 |
SUMO ROBOT COMPETITION TBE "A" Building - Great Hall …. 12:30 PM to 3:00 PM
· Design Project Presentations · Submission of Final Design Project Reports · Check-In Lego Mindstorms NXT Kits |
Team Presentations will be held during regular Lab meeting hours during week 15. Each team will present a Powerpoint presentation.
|
Submit Design Project Final report Team Presentation (Group/Team Assignments 6 and 7) Submit: Week 15 |
|
|
16 |
|
FINALS WEEK – NO LAB |
|
|
The need has been identified for you; create a sumo robot. Now the design process work begins for you.
Each student must prepare a report (one-page minimum) in which you define the problem according to the need that has been identified. Review the Objective section of this handout. When coming up with the problem definition, try to think of all the requirements that a successful product must satisfy. You should seek to answer two basic questions:
a) What technical capabilities must the robot have?
b) What features would you expect as a customer? (e.g. cost, durability, speed, ...)
Suggested Reference Material
· Chapter 2.3 in your textbook contains information about the problem definition step.
· You can learn a lot from looking at engineering design projects done by others. The web site http://poisson.me.dal.ca/~DP_MECH/ contains several detailed reports on mechanical engineering design projects at Dalhousie University.
Search the internet and/or the library for information about mobile robots. Included in your literature search must be information about U.S. Patents related to mobile robots. When performing the search look for information and patents that relate to the various characteristics, both hardware and software, that would apply to a sumo robot.
Each student must prepare a report detailing the results of your literature search. For each patent found insert a copy of the cover page, including the cover page drawing, into your report. The report must contain a minimum of five patents. Include a Bibliography listing all works cited in the report. The patents listed in the report must be cited in the Bibliography.
Suggested Reference Material
· The Patent Full-Text Databases of the United States Patent and Trademark Office can be at the following site: http://patft.uspto.gov/. The left side of this page, titled PatFT: Patents, provides the necessary search links.
· Chapter 2.4 in your textbook contains information about the search process.
· How to write a bibliography: http://www.aresearchguide.com/12biblio.html. This site has examples for patent citation as found in Example 30 (http://www.aresearchguide.com/12biblio.html#30).
· Review the Project Objective, Competition Overview, and Rules in Detail sections of this handout.
Each team must prepare a report (one-page minimum) in which you list the constraints and design criteria for the sumo robot. To help with the creation of the constraints and the design criteria review the Competition Overview and Rules in Detail sections of this handout.
Suggested Reference Material
· Chapter 2.5 and 2.6 in your textbook contains information for defining the constraints and design criteria.
As a group, hold a Brainstorming session to come up with several possible sumo robot designs. Focus only on the hardware aspect of the sumo robot. Do not worry about the programming. Document all possibilities suggested by the members of the group.
Each team must prepare a report (one-page minimum) describing the result of your team’s brainstorming session. Provide descriptions and sketches of each conceptual sumo robot design being considered. Sketches may be hand drawn or generated using computer software. The report must contain s minimum of five sumo robot concepts.
Suggested Reference Material
· Chapter 2.7 in your textbook contains information about the formulation of alternative solutions.
As a group, evaluate each of the possible sumo robot designs that were thought of during the brainstorming session and decide the best possible design. Review the Constrains and Design Criteria that you defined earlier before starting your evaluation.
Each team must prepare a report (one-page minimum) describing the evaluation process used to determine the best possible solution. Provide a description and a sketch of the sumo robot design that was chosen. Sketches may be hand drawn or generated using computer software.
Suggested Reference Material
· Chapter 2.8 and 2.9 in your textbook contain information about the analysis and decision making process.
Each team must prepare a report documenting the entire design project process. The report should contain the following sections:
Cover Page
Follow the formatting of example cover page found at the end of this handout.
Abstract
A brief paragraph indicating the purpose and results.
Table of Contents
Body
This section should be comprised of the following:
· Introduction
· Design Process – Detail the steps you went through to come up with your final design. Include the information from your previous five assignments.
· Design Description/Design Features – Describe, in detail, the function of your final mechanical design. Include information about the chassis, propulsion, sensor placement and anything else important or unique in your design. Include drawings and pictures (with labels) of the robot.
· Program Description/Program Features – Describe, in detail, the function of your final program. Include information about the flow of the program and the reasoning behind key sections used to trigger important game play features. Include screen shots (with labels) of the various sections of the program.
Conclusions and Recommendations
This section should be a few paragraphs that explain the following:
· Did you accomplish the objective of the Design Project? Not just Yes/No, but explain what happened and why.
· What could be done to improve your design?
Appendices
This section should consist of:
· Appendix 1 – Lab Log
Your weekly log as you have been recording it every week, this should follow your advances in design and programming as well as reasoning to how flaws were overcome or abandoned (as this should be the basis for your design & programming description sections, it will simply be a short, weekly version of those two sections).
· Appendix 2 – Patent Search
Select five patents from the pool of patents compiled by each member of the group during Assignment 2. Place the patent cover pages and drawings, as required in Assignment 2, into this appendix. Remember to cite the patents in the Reference section.
· Appendix 3 – {insert appendix title here}
You may want to use additional appendixes for large pictures or drawings related to the mechanical design or programming of the robot.
References
Same as the Bibliography
Each team must prepare and give a presentation documenting the entire design project process.
The presentation must be readable in Microsoft Power Point or Adobe Acrobat Reader.
The presentation must be 10 to 15 minutes in duration.
All team members must participate in the presentation.
|
Seven progress reports are due at the dates listed in the schedule above before the lab session. A penalty of 20% of the maximum grade is applied for each day of late submission. Reports more than 5 days late will be given zero credit. Each team must meet weekly. The team leader keeps a weekly log of member's contributions and attendance. The log will be part of the final report, and will be graded. Be sure to work ahead and to allow for sufficient time for discussion before submitting your team report. Please take advantage of the Mathcad software. You will enjoy the class a lot more by learning and using the engineering software tools like Mathcad.
Lab Reports· Each student is responsible for submitting a lab report in his/her own words · Reports must be submitted to the TA at the start of class on the scheduled due date. If class is not held as the result of a holiday then submit your report at the start of the next class meeting after the holiday. · Late lab reports are accepted at a penalty of 20% per day (excluding Saturday & Sunday). It is your responsibility to make arrangements with the TA to turn in late lab reports. Reports will not be accepted more than one week late. · All reports are to be word processed with 1” margins, 1.5 line spacing, and 10 or 12 point font size. · All reports must contain the following sections: o Cover page – See example at the end of this syllabus) o Introduction – Provide background information regarding the experiment/exercise. o Body – Provide detailed information about the experiment/exercise and the steps performed to reach the desired goal of the experiment/exercise. o Conclusion – Describe the results of the experiment/exercise. Was the desired goal achieved? Explain. What would you change? · Please proof read and spell check before submitting.
Policies· Mechanical Engineering (ME) Faculty Mentor - All ME students must meet their faculty mentors at least once in each semester to avoid any hold in their registration. Please contact the ME department office at (702) 895-1331 for the name of your faculty mentor. If your faculty mentor is not available due to scheduling conflicts, contact the ME department office for advice. · Religious Holidays - Any student missing class quizzes, examinations, or any other class or lab work because of observance of religious holidays shall be given an opportunity during that semester to make up missed work. The make-up will apply to the religious holiday absence only. It shall be the responsibility of the student to notify the instructor no later than the last day at late registration of his or her intention to participate in religious holidays which do not fall on state holidays or periods of class recess. This policy shall not apply in the event that administering the test or examination at an alternate time would impose an undue hardship on the instructor or the university which could not be avoided. For additional information, please visit: http://catalog.unlv.edu/content.php?catoid=4&navoid=164. · Academic Misconduct - Academic integrity is a legitimate concern for every member of the campus community; all share in upholding the fundamental values of honesty, trust, respect, fairness, responsibility and professionalism. By choosing to join the UNLV community, students accept the expectations of the Academic Misconduct Policy and are encouraged when faced with choices to always take the ethical path. Students enrolling in UNLV assume the obligation to conduct themselves in a manner compatible with UNLV’s function as an educational institution. An example of academic misconduct is plagiarism. Plagiarism is using the words or ideas of another, from the Internet or any source, without proper citation of the sources. For additional information see the Student Academic Misconduct Policy (approved December 9, 2005) located at: http://studentconduct.unlv.edu/misconduct/policy.html. · Copyright – The University requires all members of the University Community to familiarize themselves and to follow copyright and fair use requirements. You are individually and solely responsible for violations of copyright and fair use laws. The university will neither protect nor defend you nor assume any responsibility for employee or student violations of fair use laws. Violations of copyright laws could subject you to federal and state civil penalties and criminal liability, as well as disciplinary action under University policies. For additional information, please visit: http://www.unlv.edu/committees/copyright.
Academic Resources· Disability Resource Center (DRC) - The DRC determines accommodations that are “reasonable” in promoting the equal access of a student reporting a disability to the general UNLV learning experience. In so doing, the DRC also balances instructor and departmental interests in maintaining curricular standards so as to best achieve a fair evaluation standard amongst students being assisted. In order for the DRC to be effective it must be considered in the dialog between the faculty and the student who is requesting accommodations. For this reason faculty should only provide students course adjustment after having received this “Academic Accommodation Plan.” If faculty members have any questions regarding the DRC, they should call a DRC counselor. UNLV complies with the provisions set forth in Section 504 of the Rehabilitation Act of 1973 and the Americans with Disabilities Act of 1990. The DRC is located in the Student Services Complex (SSC-A), Room 143, phone (702) 895-0866, fax (702) 895-0651. For additional information, please visit: http://drc.unlv.edu/. · Tutoring - The Academic Success Center (ASC) provides tutoring and academic assistance for all UNLV students taking UNLV courses. Students are encouraged to stop by the ASC to learn more about subjects offered, tutoring times and other academic resources. The ASC building is located across from the Reynolds Student Services Complex, #22 on the current UNLV map (http://maps.unlv.edu/asc.html). Students may learn more about tutoring services by calling (702) 895-3177 or visiting the tutoring web site at: http://academicsuccess.unlv.edu/. · UNLV Writing Center - One-on-one or small group assistance with writing is available free of charge to UNLV students at the Writing Center, located in CDC-3-301. Although walk-in consultations are sometimes available, students with appointments will receive priority assistance. Appointments may be made in person or by calling 895-3908. The student’s Rebel ID Card, a copy of the assignment (if possible), and two copies of any writing to be reviewed are requested for the consultation. More information can be found at: http://writingcenter.unlv.edu/ · Rebelmail - By policy, faculty and staff should e-mail students’ Rebelmail accounts only. Rebelmail is UNLV’s Official e-mail system for students. It is one of the primary ways students receive official university communication such as information about deadlines, major campus events, and announcements. All UNLV students receive a Rebelmail account after they have been admitted to the university. Students’ e-mail prefixes are listed on class rosters. The suffix is always @unlv.nevada.edu.
↓ ↓ ↓ ↓ ↓ COVER PAGE EXAMPLE ↓ ↓ ↓ ↓ ↓
Laboratory Report {enter report number here}
{enter report title here}
Prepared For:
{enter TA’s name here}, ME 100L
Department of Mechanical Engineering
University of Nevada, Las Vegas
Prepared By: {enter first student’s name here} {enter second student’s name here} {enter third student’s name here} {enter fourth student’s name here}
Date: {enter due date here}
References
on Design
Eide Engineering Fundamentals Middendorf Engineering
Design Kemper The
Engineer and his Profession Morris Engineering: A Decision Making
Process Lab Grading: Lab Grade will be based on progress reports. Note: Your design project also constitutes 35% of your class grade. The design portion of your grade will be based on your team's final presentation and the final written report. A = 90%+; B = 80%+; C = 70%+; D = 60%+; F below 60%
Opening times for Room CBC-C 234 Undergraduate Robotics Lab Open Lab Sessions: If you require additional time, you can work on your project during any of the Open Lab sessions listed below. Please contact the teaching assistant for the section of your choice at least 12 hours before you plan to visit the lab. Contact information is provided below.
|
Lab TA Contacts
| Rohit Asuri |
asurirohit@yahoo.co.in
702-580-0945 |
|
| Kimberly Hammer |
hammerk4@gmail.com
(702) 521-0407 |
|
| Abu Iqbal | iqbala3@unlv.nevada.edu (507) 412-3831 | |