Your Semester Assignment: A Sumo Robot
Your machine will compete against another robot. Design and build a robot that accomplishes the following objectives:
1. push the opponent robot from the platform or topple the opponent while
2. keeping your own robot upright and inside the circle at all times.
End of Semester Competition
Contest Overview
- 2 robots compete at once.
- Each heat lasts two minutes or until one robot is toppled (moved on a side or upside down), or pushed outside the platform circle. If a robot leaves the platform circle on its own, the one remaining inside the circle wins.
- Robots are fully autonomous – not remote controlled.
- The robot remaining inside the platform at the end of the heat is the winner!
- If both robots move outside the platform simultaneously, the heat is considered a tie.
- If at the end of a 2-minute heat one robot's wheels or tracks are all resting on the platform, while at least one of the other robot's wheels or tracks is not in contact with the platform, then the robot whose wheels or tracks are all resting on the platform is declared the winner.
- If at the end of a first 2-minute heat no robot has an advantage, the heat is repeated immediately for a maximum duration of 2 minutes. If at the end of the second 2-minute heat one robot's wheels or tracks are all resting on the platform, while at least one of the other robot's wheels or tracks are not in contact with the platform, then the robot whose wheels or tracks are all resting on the platform is declared the winner. If at the end of the second 2-minute heat no robot has an advantage, neither robot advances to the next round.
Rules in Detail
- Platform Dimensions
- The platform is circular with an approximate diameter of 5 feet, and with a 2"-wide white rim.
- Robots face each other in the start positions.
- Robot
- Robots must measure less than 11 inches long x 8.5 inches wide x 6 inches tall at start of heat. Total robot weight must not exceed 2.5 pounds (40 US ounces). Each robot may use a maximum of three motors. Robots exceeding any one of these limitations will be disqualified.
- Robot must be a single, physically rigid entity consisting entirely of standard Lego parts. Refer to the illustrations on the bottom of this page for a list of permissible parts. “Multiple robot” designs are not allowed. Each robot is limited to one 'NXT brick' only. The use of one rubber band per sensor is permissible if used with the sensor, e.g. to maintain contact between a Lego part and a sensor. You may also use rubber bands or cable ties in order to tighten connector cables. Additional weights in the form of Lego or Metal parts may be added to robots weighing less than 2 lbs. Any metal weights must be firmly attached to the robot, and be surrounded on all sides by standard Lego parts.
- Lego parts may neither be glued together, nor altered in any way. No grinding, cutting or other shaping of Lego parts is permitted. Any robot containing glued or altered or containing non-standard parts will be disqualified, and the team members will be requested to replace any glued or altered parts.
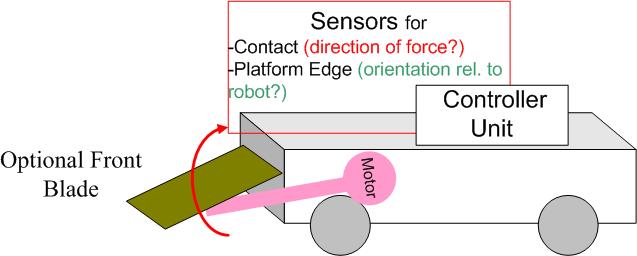
- Robot may use up to two motors for propulsion. Robots employing a front 'blade' or grappling hook to lift their opponent may use an additional third motor for lifting.
- Game Play
- The Heat
- In a each heat, two robots compete against one another for a maximum of three minutes .
- Robots will be manually started on the judge's cue.
- The heat ends when any one the following three situations occur: (a) one robot moves or is pushed off the platform, or (b) one robot has been partially pushed off the platform and is unable to return onto the platform under its own power within 15 seconds from being pushed off, or (c) one robot stops moving under its own power for any reason, or (d) the 2-minute time limit has been exceeded. Reasons for loss of motion may include: being toppled by opponent, loss of vehicle parts, loss of battery power, software malfunction and others.
- The robot remaining on the platform and able to continue to move under its own power wins the heat and advances to the next heat.
- If two robots become entangled during the heat such that they no longer can move independently, the heat is declared a tie. The robots will be separated and the heat will be replayed immediately.
- If at the end of a 2-minute heat one robot's wheels or tracks are all resting on the platform, while at least one of the other robot's wheels or tracks are not in contact with the platform, then the robot whose wheels or tracks are all resting on the platform is declared the winner.
- If at the end of a first 2-minute heat no robot has an advantage, the heat is repeated immediately for a maximum duration of 2 minutes. If at the end of the second 2-minute heat one robot's wheels or tracks are all resting on the platform, while at least one of the other robot's wheels or tracks are not in contact with the platform, then the robot whose wheels or tracks are all resting on the platform is declared the winner. If at the end of the second 2-minute heat no robot has an advantage, neither robot advances to the next round.
- Starting Orientation
- At the beginning of each heat, robots will face each other front to front, at a distance of 12 inches front blade to front blade.
- Robot front is defined as the end of the robot that is designed to lift or push the opponent away.
- Robots will be placed with the center of their body located over the marked starting point.
- The Tournament
- The tournament will be held on a Monday during the 15th week of the semester, beginning at 1:00 pm.
- Once the Monday tournament begins, modifications to a robot’s design (except reprogramming) are not allowed.
- A round is a group of heats in which each robot in the tournament plays once.
- In the first round of the tournament, robots will be randomly matched against one other.
- If only three robots remain during any round, contest judges may decide to run that part of of the competition in a
round-robin format (each robot plays another). Example: three robots (A,
B, and C) remain. The judges may decide to run three
matches (AB, AC, BC). There are three possible outcomes from here:
- If one robot wins both of its heats, it is the champion.
- If one robot loses both of its heats, it is eliminated, and the other two robots play a single heat to determine the champion.
- If each robot wins once, the round-robin is run again.
- The Heat
- Miscellaneous
- Robots may not intentionally damage or destroy their opponent.
- Robots may not transmit infrared signals to any other robot at any time during the competition. Any robot transmitting infrared signals during the competition will be disqualified.
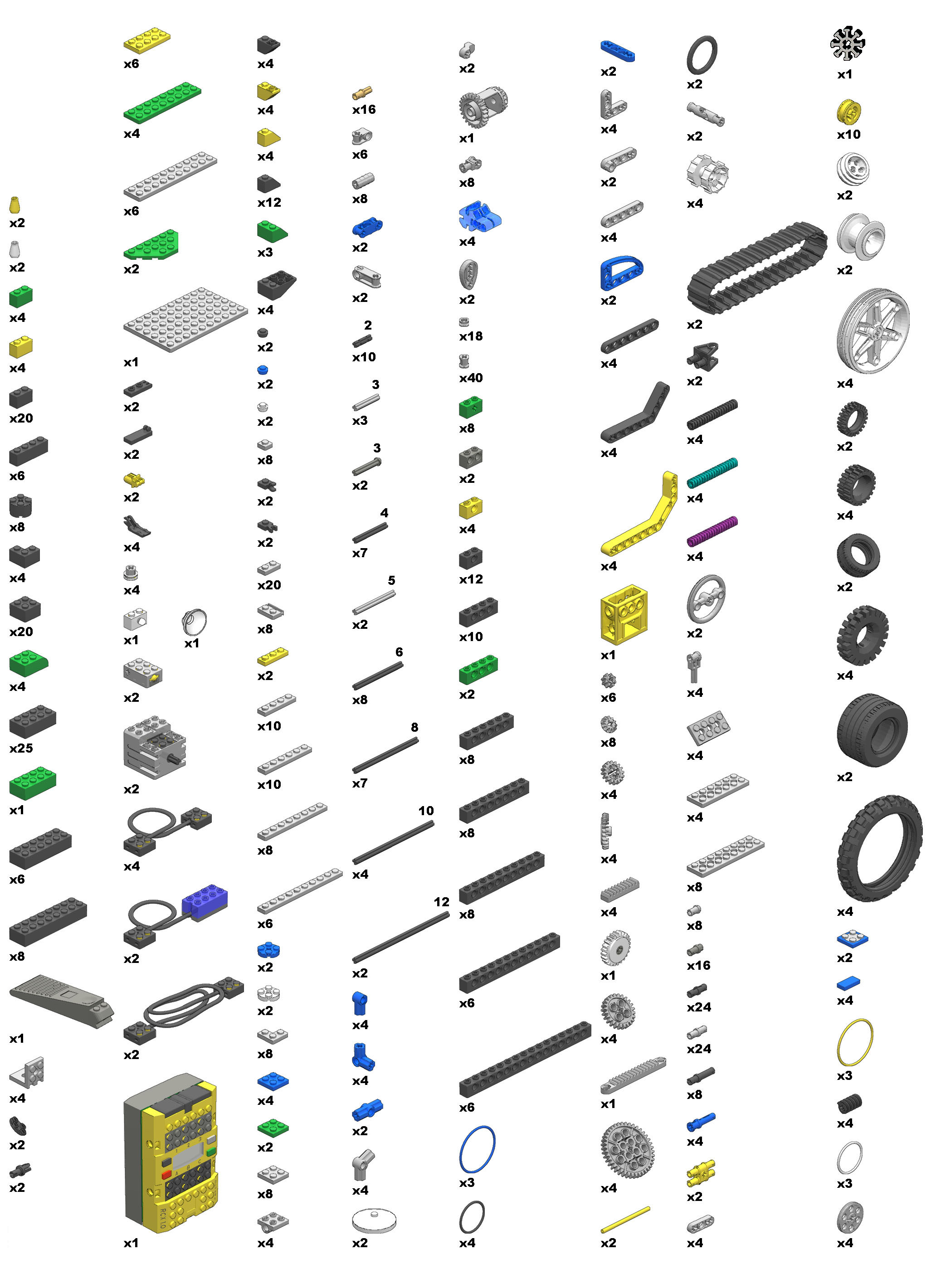
Permitted Lego Parts
The parts list below is exclusive: If you don't find the part here, it is not allowed.
Do NOT alter Lego parts in any way! Do not use damaged or broken parts!
All Lego parts included in the standard LEGO Mindstorms set are allowed, such as:
1. Mindstorms RCX controller, sensors and motors.

2. Mechanical Parts, see image below. Some items are duplicates.
 Click
on thumbnail for detail.
Click
on thumbnail for detail.
Hardware Design Advice
When designing your robot, please consider the following:
-
Compactness. The smaller and the more compact your design, the more robust it will be. Parts that stick out can get trapped or fall off.
-
Chassis: Your robot will likely roll on wheels or tracks. Think about how to best steer and propel the vehicle. Design for maximum traction. Avoid wheel blockage. When the wheels or tracks are spinning, the robot has less forward thrust than during normal motion.
-
Sensors: Use them to detect where you are (to avoid getting pushed off the platform) and where your opponent is (so that you can respond to opponent's moves). You can use up to three sensor input channels on the RCX brick. You will probably mount the sensors near the vehicle perimeter, but you must also guard against loss or damage.
-
Appearance: This should be your last concern. Try to create pleasant shapes to make your design appealing.
Software Design Advice
1. Organization. Plan the layout of your program. You can program in two languages: Mindstorms or Robolab. Robolab requires more learning, but will give you much better programming options. You are strongly advised to use Robolab for programming.
2. Light sensor. Ambient illumination levels alter the light sensor signal level. Do NOT program the light sensor to trigger at a FIXED number, say 24. Such simplistic programming will guarantee failure during the competition in the Great Hall, which has brighter lighting and unpredictable daylight. It is better to detect and save the ambient light level at the start of the heat, and then to respond to signals greater than the start level + some threshold level.
3. Navigation. You must solve two issues:
a. Path Planning: You may want to position your robot as close to the center as possible. This requires a continuously updated estimate of your location..
b. Opponent Identification: You must locate your opponent's position so that you can either push him off the field or topple him.